Robotyka w praktyce klinicznej. Nowe aspekty bezpiecznego ułożenia chorych
Ali Ghomi, MD
Do zapamiętania
- Chirurg wykonujący operacje wspomagane przez robota oraz zespół anestezjologiczny muszą być świadomi możliwości wystąpienia poważnych powikłań w trakcie takich operacji.
- Metody ułatwiające układanie chorych na stole operacyjnym podczas zabiegów wspomaganych przez robota mają zasadnicze znaczenie dla zwiększenia bezpieczeństwa chorych i uzyskania lepszych wyników leczenia.
Coraz częściej w praktyce chirurgicznej wykorzystywane są operacje laparoskopowe wspomagane przez robota. Zwykle są wykonywane w ułożeniu chorych w możliwie najbardziej stromej pozycji Trendelenburga, co może stać się przyczyną różnych powikłań w okresie okołooperacyjnym. W rzeczywistości takie ułożenie nie zawsze jest konieczne podczas operacji wykonywanych z powodu łagodnych schorzeń.
W 2005 r. Food and Drug Administration zarejestrowała robota da Vinci (da Vinci Surgical System, Intuitive Surgical Inc, Sunnyvale, Kalifornia) do operacji ginekologicznych. Od tamtej pory wykorzystanie tego systemu w chirurgii ginekologicznej stale się zwiększa. Celem wprowadzenia operacji laparoskopowych wspomaganych przez robota, powszechnie nazywanych chirurgią da Vinci, było rozwiązanie wielu problemów tradycyjnej laparoskopii. Obecnie system ten jest wykorzystywany w wielu ośrodkach w Stanach Zjednoczonych do przeprowadzania operacji ginekologicznych, uroginekologicznych oraz wykonywanych z powodu nowotworów narządu rodnego. Przewaga operacji laparoskopowych wspomaganych przez robota nad konwencjonalnymi zabiegami laparoskopowymi wynika ze stosowania trójwymiarowego toru wizyjnego, większej precyzji i sprawności (narzędzia EndoWrist), wyeliminowania drżenia rąk oraz mniejszego zmęczenia operatora. Wadami metody są: jej znaczny koszt, zajmowanie dużej powierzchni sali operacyjnej oraz brak możliwości posługiwania się dotykiem.
Właściwe ułożenie chorej na stole operacyjnym ma zasadnicze znaczenie dla optymalnego uwidocznienia pola operacyjnego oraz zapobiegania pourazowym uszkodzeniom nerwów i mięśni. Podczas operacji wspomaganych przez robota ułożenie chorej odgrywa jeszcze większą rolę, ponieważ musi nie tylko ułatwić dostęp do pola operacyjnego, ale również umożliwić pracę kamery robota i jego ramion roboczych. Z tego powodu w trakcie operacji ginekologicznych z użyciem robota chore rutynowo układa się w stromej pozycji Trendelenburga odpowiadającej nachyleniu stołu do 30-40°, a zatem jeszcze większemu niż podczas konwencjonalnej laparoskopii. Takie postępowanie częściowo uzasadnia fakt, że po ustawieniu robota w pozycji operacyjnej z narzędziami podłączonymi do jego ramion nie ma możliwości zmiany pozycji stołu bez przesuwania robota. W związku z tym operujący chętniej stosują ułożenie w bardziej stromej pozycji Trendelenburga, aby uzyskać jak najlepszy wgląd w pole operacyjne i uniknąć ponownego poruszania stołem operacyjnym, gdy okaże się, że konieczne jest uzyskanie większego nachylenia. Wykonywanie operacji ginekologicznych wspomaganych przez robota w takiej pozycji bywa jednak przyczyną rzadkich, ale poważnych powikłań. Dlatego zespół uczestniczący w takich zabiegach musi dokładnie znać i rozumieć mechanizm powstawania powikłań wynikających z takiego ułożenia chorej.1
W niniejszym artykule omówiono strategie ułatwiające właściwe ułożenie chorej podczas operacji ginekologicznej wspomaganej przez robota, zapewniające jej bezpieczeństwo i prawidłowe wyniki zabiegu. Przedstawiono też najczęstsze powikłania operacji wspomaganych przez robota powstałe w następstwie nieodpowiedniego ułożenia chorej na stole operacyjnym oraz zalecenia mające na celu zapobieganie takim powikłaniom.
Ułożenie chorej podczas operacji wspomaganej przez robota
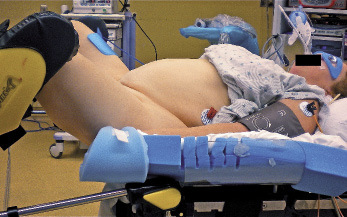
Rycina 1. Osłony chroniące chorą.
Na wstępie chorą układa się na plecach w pozycji litotomijnej z kończynami dolnymi w strzemionach typu Allen Yellofins (Allen Medical Systems, Acton, Massachusetts), jak do konwencjonalnej laparoskopii (ryc. 1). Obowiązują te same zasady odpowiedniego podłożenia wyściółek pod wszystkie punkty ciała narażone na ucisk, a także unikania nadmiernego zgięcia, przeprostu i odwiedzenia kończyn, mające na celu zminimalizowanie narażenia na uszkodzenia nerwów i mięśni. Trzeba starannie dobrać podkładkę pod potylicę (np. krążek żelowy widoczny na rycinie 2), aby zapobiec martwicy niedokrwiennej, w następstwie której dochodzi do łysienia. Wykorzystuje się standardowy zautomatyzowany stół operacyjny, który można przechylić do 30°.

Rycina 2. Podkład stabilizujący pozycję chorej.
Zaleca się przestrzeganie kilku zasad, które zapewnią stabilność ułożenia chorej na stole operacyjnym w stromej pozycji Trendelenburga. Na środkowej części stołu, w miejscach ułożenia kończyn górnych, układa się poziomo prześcieradło chirurgiczne o wymiarach 90 x 150 cm, na nim warstwę gąbki falistej, którą mocuje się taśmą do stołu operacyjnego (ryc. 2). (Prześcieradłem można później owinąć i umocować ramiona). Niektórzy autorzy radzą zastosowanie dwóch warstw gąbki jako materiału antypoślizgowego, aby zapobiec zsunięciu się chorej. Jest to szczególnie przydatne u chorych z otyłością olbrzymią.2 Przydatne bywa też umieszczenie chirurgicznych podkładek żelowych w miejscach, w których skóra chorej jest odsłonięta, trzeba je jednak za każdym razem dezynfekować, a mogą one również wywołać reakcje alergiczne. Niektórzy chirurdzy potrafią skutecznie zabezpieczyć i ustabilizować kończyny górne otyłych chorych za pomocą dobrze wyścielonych szyn chirurgicznych (ryc. 1) wykonanych ze sztywnego plastiku. Zaprojektowano je tak, aby leżały pod materacem pokrywającym stół operacyjny i pozwalały na wygodne ułożenie w nich kończyny.
Kolejnym urządzeniem zaprojektowanym w celu ustabilizowania pozycji chorej i zapewnienia odpowiedniego podłoża podczas operacji wspomaganych przez robota wykonywanych w stromej pozycji Trendelenburga jest podkładka Bean Bag Positioner (AliMed Inc, Dedham, Massachusetts). Jest to materac żelowy mocowany do stołu operacyjnego, który po odessaniu z niego powietrza dostosowuje się do kształtu górnej części ciała i ramion chorej, co pozwala na ustabilizowanie jej pozycji. Potencjalne wady tego urządzenia to dłuższy czas przygotowania, niedostrzegalne rozszczelnienie w trakcie zabiegu oraz konieczność dezynfekowania materaca.
W naszy ośrodku podczas operacji wspomaganych przez robota najchętniej wykorzystuje się pojedynczą warstwę gąbki, a kończyny górne chorej umocowuje do boku ciała, owijając prześcieradłem lub umieszczając w przeznaczonych do tego celu szynach. Z naszego doświadczenia wynika, że jest to najprostsza, powtarzalna i szybka metoda ustabilizowania pozycji chorej na stole operacyjnym. W dalszej części artykułu uzasadniamy, że ułożenie w stromej pozycji Trendelenburga na ogół nie jest konieczne, nawet u chorych z otyłością olbrzymią. Jeśli jednak można się spodziewać długotrwałego ułożenia w tej pozycji (z nachyleniem stołu pod kątem 30-40°), chirurg powinien rozważyć zastosowanie jednej z opisanych wyżej metod, aby zapobiec przemieszczeniu się chorej.
Fizjologiczne skutki odmy otrzewnowej w stromej pozycji Trendelenburga
Chirurg operujący ze wspomaganiem robota oraz zespół anestezjologiczny znieczulający do takiej operacji muszą znać fizjologiczne skutki wytworzenia odmy otrzewnowej u chorej ułożonej w stromej pozycji Trendelenburga. Czynnościowa pojemność zalegająca płuc zostaje zmniejszona w wyniku wytworzenia odmy w jamie brzusznej i ułożenia w pozycji Trendelenburga.3 Następstwami zaburzenia równowagi między wentylacją a przepływem krwi w pęcherzykach płucnych są hiperkapnia i kwasica. Nieprawidłowości te można skorygować, zwiększając objętość minutową, ale chore z upośledzoną czynnością płuc nie zawsze tolerują takie obciążenia w trakcie wspomaganej przez robota operacji prowadzonej w stromej pozycji Trendelenburga.
Podczas takiej operacji mogą się też pojawić problemy ze strony układu sercowo-naczyniowego. Wytworzenie odmy otrzewnowej przyczynia się do zmniejszenia powrotu żylnego i wstępnego obciążenia serca. Narasta też następcze obciążenie serca wtórnie do uciśnięcia aorty i zwiększonego napięcia włókien współczulnych naczyń. W wyniku tych zmian może dojść do zmniejszenia wskaźnika sercowego nawet o 50% i zwiększenia ciśnienia w tętnicy płucnej, żyłach centralnych oraz ciśnienia wewnątrzczaszkowego. Aż u 27% pojawiają się zaburzenia rytmu serca, głównie w następstwie wzmożonego napięcia nerwu błędnego i hiperkapni.4
W celu ograniczenia występowania i skutecznego rozwiązywania problemów związanych ze znieczuleniem i ułożeniem chorej podczas operacji wspomaganych przez robota chirurg wykonujący takie operacje powinien ściśle współpracować z zespołem anestezjologicznym, który dobrze zna zagadnienia fizjologiczne swoiste dla operacji prowadzonych w stromej pozycji Trendelenburga.